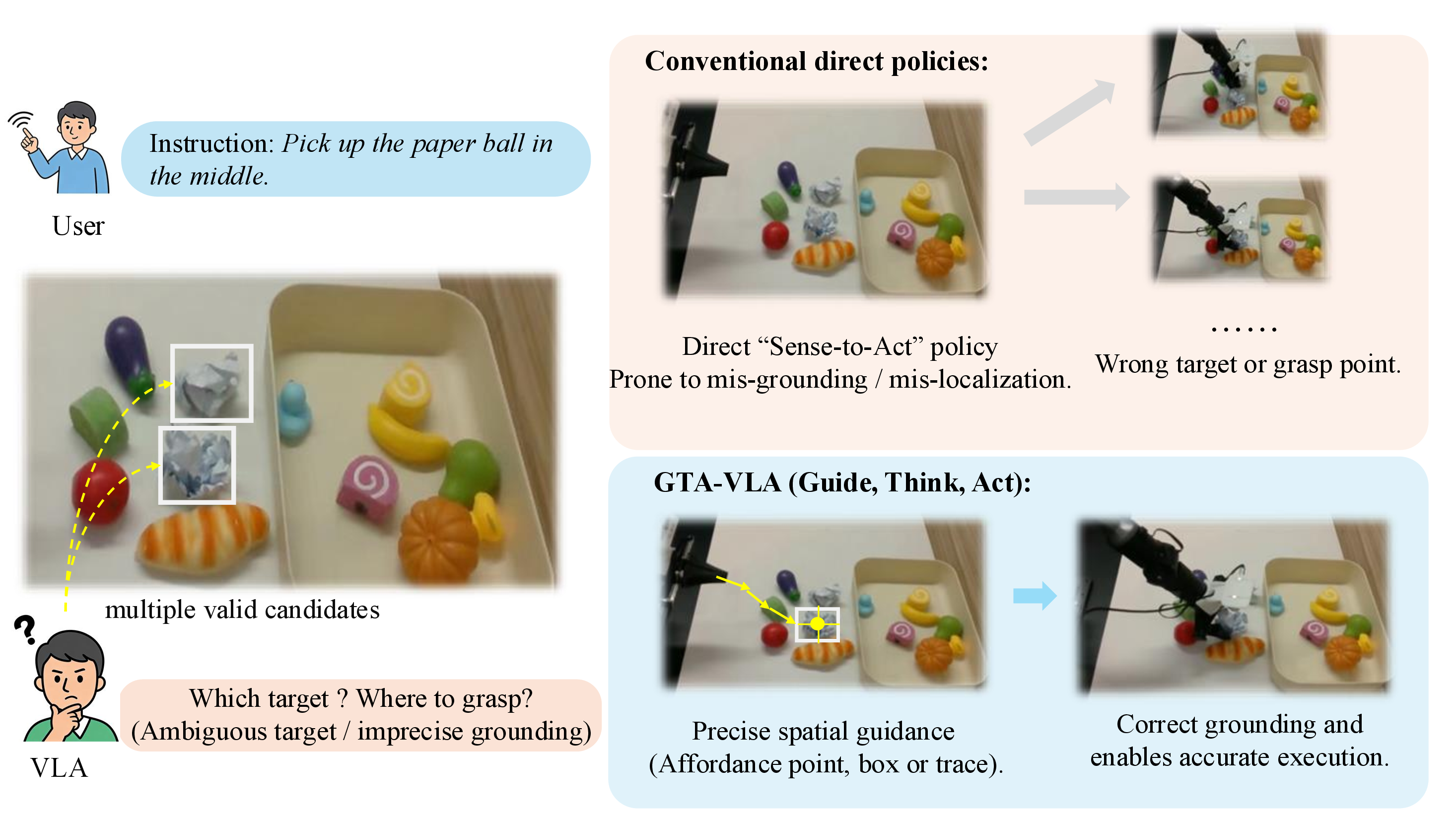
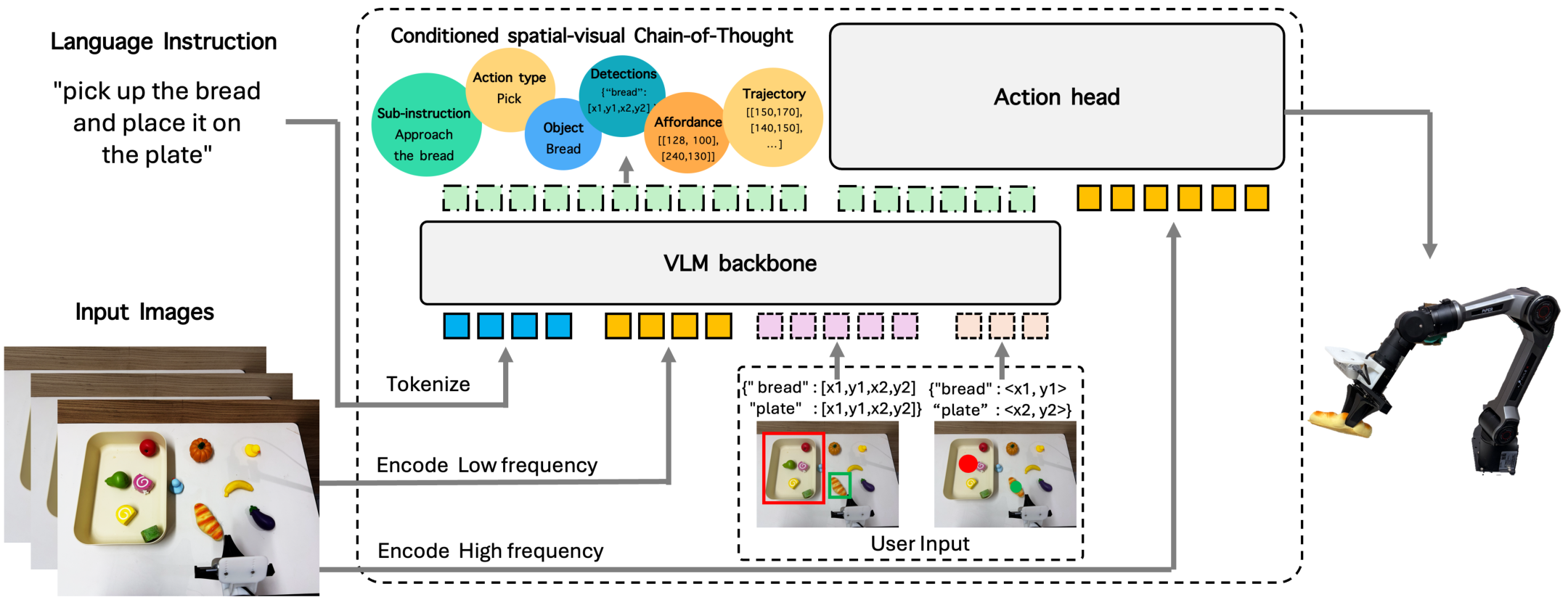
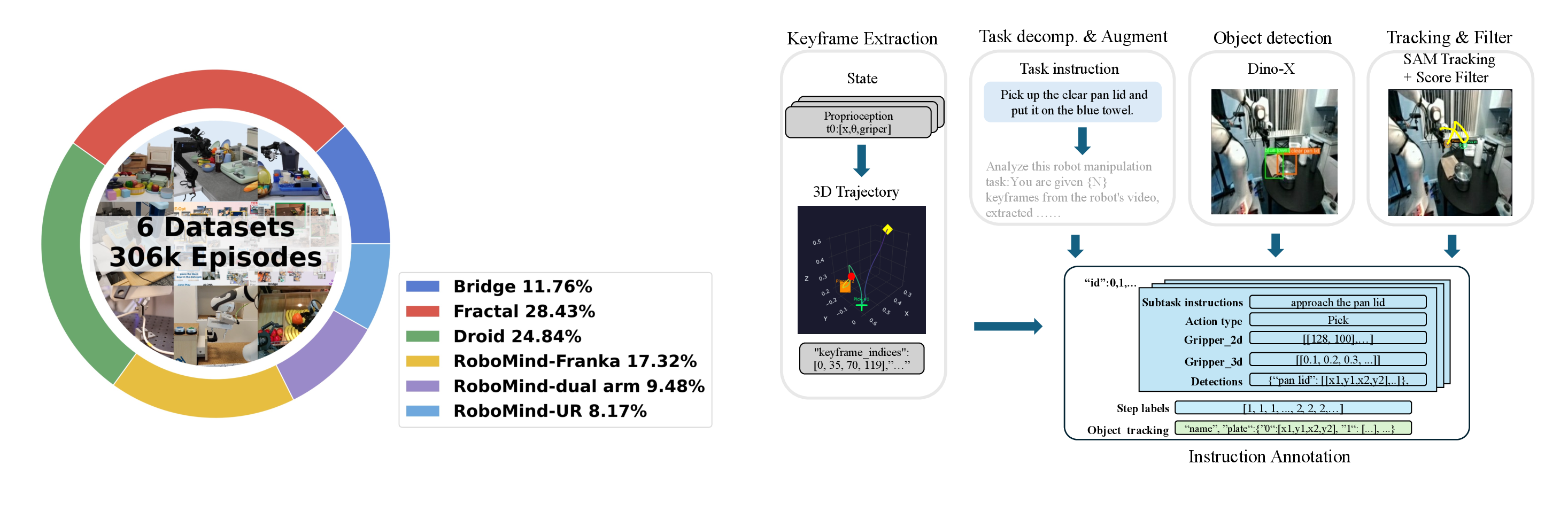
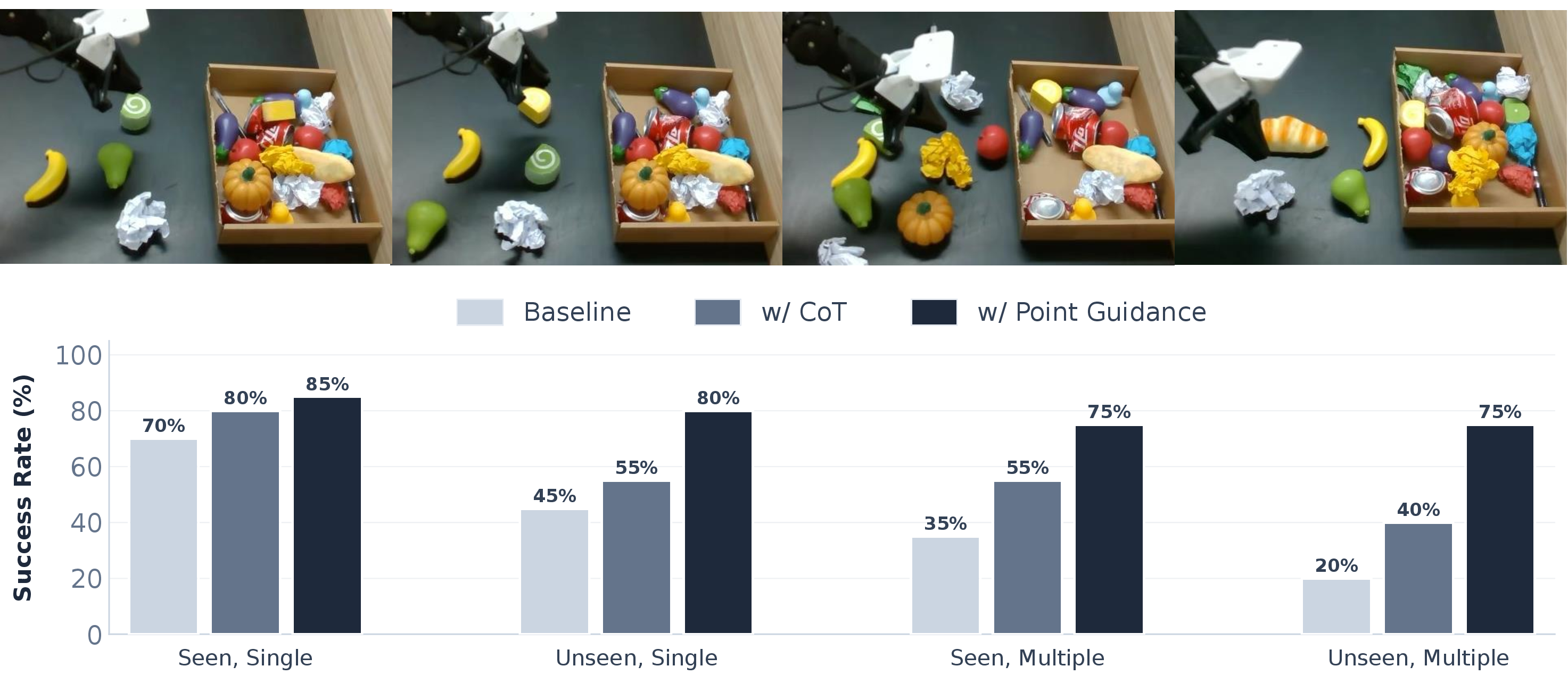
GTA-VLA
Guide, Think, Act: Interactive Spatially Steerable Vision-Language-Action
Yiran Ling2,3,7,*,‡, Qing Lian1,*, Jinghang Li1,4, Qing Jiang3,5, Tianming Zhang6, Xiaoke Jiang6, Chuanxiu Liu6, Jie Liu2,7,†, Lei Zhang1,3,6,†
* Equal contribution
‡ This work was done during an internship at Futian Laboratory.
† Corresponding author: leizhang@idea.edu.cn, jieliu@hit.edu.cn.
1Futian Laboratory
2Faculty of Computing, Harbin Institute of Technology
3International Digital Economy Academy (IDEA)
4School of Robotics, Hunan University
5South China University of Technology
6Visincept
7National Key Laboratory of Smart Farm Technologies and Systems